This robot was the begining of my love and facination with robotics. Here I learned the power of hacking a servo, building my own sensors, and programming and controlling it via PC.
This robot is also featured at Robots.Net.
| Chassis: |
A Radio Shack 6\"x4\" Project Box. Catalog Number: 270-1806 cost $4.99. |
| Power: |
Since it\'s tethered I was able to use an old PC power supply. It supplies +5VDC and ground via two unused wires in the RJ-45. |
| Movement: |
2 \"Hacked\" Futaba 3003 DC Servo Motors. The hack I used was to replace the potentiometer with a voltage divider consisting of two 1/4 watt 2.2k resistors.
2 - continuous rotation servos (Parallax) $13/each.
4 - 1/4 watt resistors Jameco, Radio Shack, etc. $0.99/100 |
| Sensors: |
2 Hi-Output IR LED\'s from Radio Shack part number (276-143) $1.79 each and 1 Sharp 40 kHz IR Receiver Module part number(?).
|
| CPU/OS: |
WinNT/Visual Basic 5.0/6.0 -- At the time I Windows NT and the OS does not have direct access to the I/O so I had to use the DriverLINX by Scientific Software Tools, Inc. I also used a bit of code that allows me to measure how long my PC takes to perform For-Next operations. This was very helpful in sending the correct Microsecond pulse to the servo motors, mainly since VB\'s timer is only Millisecond resolution.
|
| Other Info: |
The tether is a 25\' RJ-45 cable connected to my PC\'s Parallel Port.
So far I have only tested one genetic algorithm. It\'s goal is to teach Tetherbot how to get out of it\'s playpen in a certain amount of time. If I turn on the \"avoid object\" algorithm it will eventually be able to escape but I wanted the robot to be able to get out on it\'s own and learn how to do it, and be able to repeat what it has learned, etc.
|
| Software Info: |
|
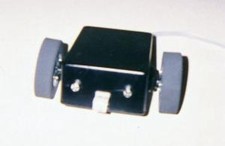
This was robot # 2. It's more complex than FollowBot in that it is controlled via the parallel port of my PC, runs on two Futaba DC servo motors and uses two modulated IR LEDs as Eyes for object avoidance.TetherBot consist of:
- 2 "hacked" servo motors
- 555 IR Modulated Timing Circuit
- 2 IR LEDs and a 40Khz detector
- Parallel Port Interface to the PC
- An old PC Power Supply supplying 5VDC.
I would like to thank Roger Arrick for his website to enable me to get this far with TetherBot.
The neatest part was building the 555 Timer circuit and modulating the eyes. Though tether was connected to my PC, I had a 50ft. cable that allowed roam free access to my Apartment. The longest he ever went without getting stuck was 6 hours, 15 minutes.
TetherBot is a technology demonstrator, like his predecessor FollowBot. The main technologies that he demonstrated were: IR Object Avoidance. Servo Control from the PC (Windows NT 4.0).
Today I would have used a PIC Microcontroller to get the readings from the eyes and to modulate the signals to the servos. I would also use some Sharp IR Rangers to act as my eyes vs. creating a 555 Timer circuit to give me the modulation of 40khz.