
Built: 2005-06-01 00:00:00
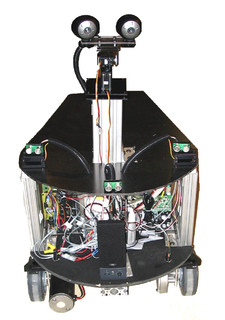
This is the robot I used for my book. It has pretty much the same components as Feynman3, but is smaller and is more stable.
Specs
| Chassis: | 80-20 Aluminum Extrusion, courtesy of my father. Black PVC from McMaster.Com. |
| Power: | (2) 33AH Batteries from Batteries Plus $100. All DC power regulated by onboard controller and distribution boards. The wiring I purchased from robotmarketplace.com. |
| Movement: | (2) NPC-41250 12-24V 7.5 RPM per Volt (2) Victor 883 Speed Controllers. (IFI Robotics cost of $150/ea ($300 total). (1) Scott Edwards Mini-SSC II |
| Sensors: | (2) Pyro 1394 Firewire Webcams (2) Sharp GP2D02 IR Sensors (3) SRF04 Devantech Sonar (1) Microphone |
| CPU/OS: | PC - VIA EPIA M10000 Mini-ITX with 256MB Ram, a 20Gig HDD, and wireless 802.11b/g. Software 100% written in Java. IDE - Eclipse |
| Other Info: | I also have a USB powered speaker for speech synthesis, and the left and right sonar move via two HS-422 servos. |
| Software Info: |
Other Robot Info
This is the sonar distribution board I used in Feynman5. The board has two 5V regulators, an on off switch, 5 RJ11 and one RJ45 connectors. It also has 14 connector .100" connector pins as well as a power LED. This board solved all of my sensor connector problems.

