
- A new computer.
- 2 Webcams for stereo vision.
- Chassis of Acrylic & 80-20 Extruded Alumnum
- Cordless via (2) 12volt 33 Amp-Hour Batteries.
- No more drill motors via (2) Windshield Wiper Motors out of Ford F-150 Pick-Up via junkyard. (2) Victor 883 Speed Controllers.
The software is a combination of remote control via web server and autonomous algorithms all written in Java.
Some Early Attempts
I went through a lot of chassis designs until I finalized on the one you see pictured above. Here are some attempts and what I liked and did not like about them.
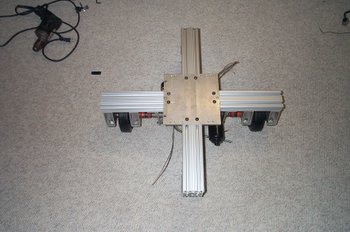 |
Here is the first base design. It was very sturdy but the middle plate kept getting in my way. |
 |
Here is the bottom of the first base design. It shows the two motors, two casters for a Diamond wheel base (which wobbles by the way) and the encoder wheel. |
 |
Here is the top of the first base design with speed controllers attached. |
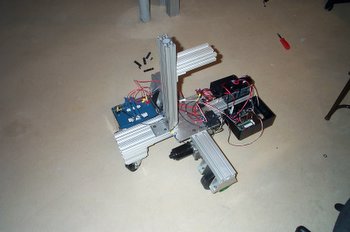 |
Here is the bottom of the first base design. It shows the a single battery where I housed the microcontroller and power distribution. |
 |
Here is a picture of Feynman 3 with a laptop attached. Although it worked well I found the VIA single board PC for $100 from an article at robots.net and it just lasted a week-end. |

