Built: 2001-10-10 00:00:00
This robot is just a chassis upgrade of the previous robot (Baby Joe).
Specs
| Chassis: |
Aluminum and acrylic 1/8\" sheets from Lowes. (about $5.00) |
| Power: |
Basic Stamp II = 4 x \"D\" cell providing 6VDC regulated by a 5VDC Regulator from Radio Shack. There will also be a switch to function as a global on/off power switch. |
| Movement: |
2 \"Hacked\" Futaba 3003 DC Servo Motors. The hack I used was to replace the potentiometer with a voltage divider consisting of two 1/4 watt 2.2k resistors. 2 - continuous rotation servos (Parallax) $13/each. 4 - 1/4 watt resistors Jameco, Radio Shack, etc. $0.99 per 100 |
| Sensors: |
2 Hi-Output IR LED\'s from Radio Shack part number (276-143) $1.79 each and 1 Sharp 40 kHz IR Receiver Module part number(?). |
| CPU/OS: |
Basic Stamp 2 / PBasic 1.0 |
| Other Info: |
Basic Stamp I/O
| Pin # |
Function |
| 0 |
Servo 1 - Left Motor |
| 1 |
Servo 2 - Right Motor |
| 2 |
IR LED - Left Front |
| 3 |
IR LED - Right Front |
| 4 |
Spare |
| 5 |
Spare |
| 6 |
IR Detector Circuit |
| 7 |
Spare |
| 8 |
Spare |
| 9 |
Spare |
| 10 |
Spare |
| 11 |
Spare |
| 12 |
Spare |
| 13 |
Spare |
| 14 |
Spare |
| 15 |
Spare |
|
| Software Info: |
|
Other Robot Info
This is a cleaner version of Baby Joe. Just a new chassis, that's it. Two things to note:
- Because the eyes are spread farther apart, he is much more adept at avoiding things.
- The robot is also more stable because I moved the wheels back, though it creates a little more drag on the motors.
 |
 |
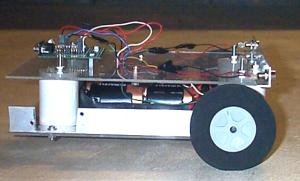
Side View
Again I used the no 3rd wheel system. This did not present any problems and kept the bot's profile low. |
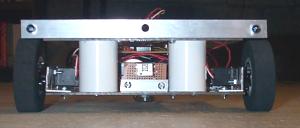
Front View
Because the eyes were farther apart, the bot was better able to avoid things.. |
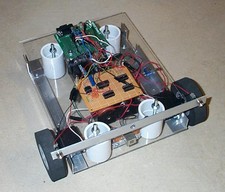
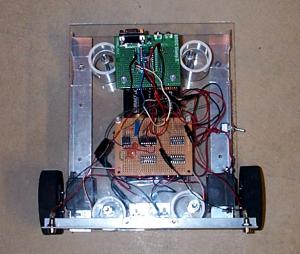 Top / Inside View
Top / Inside View
The acrylic made it much easier to moint the PCBs on!