
Much like the other two robots Baby Joe is a technology demonstrator. My 1st experience with Basic Stamps was very good! These are the coolest little chips. If you have a working COM port, snap this chip in, write a program, and your off and running.
Baby Joe, is very similar to TetherBot except he has a Basic Stamp II for a brain and 4 D cells as a power supply. The acrylic and aluminum chassis that I bought at Lowes, was real nice to work with and cheap (less than $5.00). I used a cabinet knob as a rest for the back of the robot. Since the robot is slightly back heavy it rest there nicely and does not cause too much friction on a carpet.
Baby Joe is another technology demonstrator built a lot like Tetherbot. The only difference is his size, the addition of a Basic Stamp II and a Battery pack. Other than that he does the same things.
 |
 |
| Rear View Again I used the no 3rd wheel system. This did not present any problems and kept the bot's profile low. I added calibration port hole for the IR tuning potentiometer. I think this was the best feature of the new bot. Now I could calibrate the eyes with a debug program and then set the bot off to avoid things at different distances. |
Front View Because I reused an old project box I could not fit the IR receiver inside the box, but no worries, it's only impact was on aesthetics. |
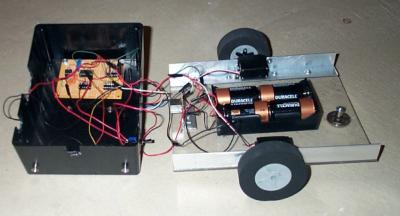
Inside View
Now you see what makes Baby Joe go. The 4 D cells provide the power and on a PCB to the left mounted underneath you have the IR Oscillators and voltage regulator.

